






Como identificar e reparar erros durante o plantio
Por Giancarlo Rocco, gerente de Marketing da Precision Planting no Brasil
04.01.2021 | 20:59 (UTC -3)
A colheita mecanizada da cana-de-açúcar é realidade em praticamente todas as áreas cultivadas no País. No entanto é preciso estar atento aos impactos que a compactação do solo tem sobre a produtividade e longevidade dos canaviais e fazer as adequações necessárias para atingir os melhores ganhos econômicos.
A colheita mecanizada de cana-de-açúcar cresceu de forma exponencial na última década, passando de 25% para praticamente 95% de adoção desse sistema ante a colheita manual. Os ganhos relacionados à redução de custo em reais por tonelada com o uso da colheita mecanizada são indiscutíveis, porém uma análise detalhada com relação aos impactos que as máquinas (colhedoras + tratores e transbordos) causam no canavial devem ser levados em consideração e analisados detalhadamente para que ações de gestão agrícola sejam tomadas buscando, além de redução de custos, ganhos de produtividade e lucratividade.
Leia também
Quando comparamos a evolução da produtividade em culturas como milho, soja e algodão, notamos que nesse mesmo período houve um incremento da ordem de 30 a 40% em produtividade, enquanto que nos canaviais brasileiros a produtividade média continua estagnada entre 75 a 80 t/ha. Obviamente, essa estagnação está relacionada a outros entraves tecnológicos e não exclusivamente ao uso de máquinas nas lavouras, mas vale lembrar que as usinas e produtores que vem adotando as melhores práticas de mecanização agrícola, são as que vêm conseguindo atingir produtividades médias acima de 95 t/ha, ou seja um incremento entre 20 a 30% (BELARDO, 2016a)
Um fator extremamente relevante está relacionado ao período de safra e época de colheita que aumentou em 50% no período chuvoso pois a safra que era antes realizada de maio a novembro, hoje é realizada de março à dezembro, muitas vezes tendo início em janeiro ou fevereiro no período de maiores precipitações (MAZZA, 2016) e o tráfego de máquinas em áreas de maior umidade acarretam em maior compactação de solo.


Para entendermos qual é o impacto das máquinas na colheita de cana, precisamos em um primeiro momento fazer algumas observações de campo, onde frequentemente é possível observar situações, resultantes da ação de compactação e pisoteio generalizado das linhas de cana.
Situações como essa levam inevitavelmente à uma queda de produtividade nos anos subsequentes e queda da longevidade dos canaviais. A compactação é maior quanto maior a curvatura da sulcação, e a soma das compactações da linha e entre-linha, quando ocorre precipitações intensas implica em escorrimento de água, solo, além de herbicidas e fertilizantes o que acaba inevitavelmente sobrecarregando os terraços (MAZZA, 2016).
Além disso, o impacto da compactação de solo está diretamente relacionado à menor quantidade de enraizamento do canavial e confinamento da raiz em menores áreas no solo acarretando em menor absorção de água e nutrientes pela planta, maior suscetibilidade à veranicos e períodos secos e perdas de produtividade.
Para tentarmos mensurar as perdas de produtividade relacionadas a compactação e pisoteio da linha de cana, podemos usar alguns dados de pesquisa do CTC que estimam perdas entre 10 a 15 t/ha por ano de colheita. Considerando essas premissas temos entre 10% a 20% de queda de produtividade de um ano para outro em t/ha, o que no final de um período de 5 anos do canavial implicaria em perda de um ano safra ou aproximadamente 75 t/ha (BELARDO, 2016a).

Fica evidente que o impacto da compactação na linha e na entre linha de cana e o pisoteio de soqueira são extremamente relevantes e que a interação máquina x canavial deve ser melhor gerenciada.
Para entender melhor o conceito de pisoteio e trafego na cultura da cana-de-açúcar é fundamental que exista um afastamento de segurança entre a máquina e a cultura que, conforme Mialhe (2004) corresponde ao afastamento lateral, de ambos os lados do eixo da fileira de plantas, a partir do qual a passagem da roda é inócua tanto a parte aérea como ao sistema radicular.
Ripoli e Ripoli (2009) comentam que em cana-de-açúcar devemos ter o mínimo de 25 cm de distância entre a borda da banda de rodagem do pneu ou esteira mais próximo da fileira de cana e o centro da linha de soqueira. Sabemos que a cana-de-açúcar tem um comportamento de perfilhamento lateral para a entre linha e de uma forma geral, podemos considerar que uma soqueira de cana tem aproximadamente 40 cm de largura (20 cm para cada lado do centro da linha).
Sendo assim, convergindo o conceito de afastamento de segurança de Mialhe com a definição de Ripoli e Ripoli podemos afirmar que em um canavial com uma soqueira de aproximadamente 40 cm de largura, teríamos 15 cm de afastamento de segurança para colheita de cana-de-açúcar (BELARDO, 2016b).


Baseado nessas premissas, faremos uma análise técnica dos principais conjuntos de colheita (Colhedoras + Tratores e Transbordos) e os principais espaçamentos adotados no Brasil (simples de 1,50 m e duplo alternado de 0,90m X 1,50m).
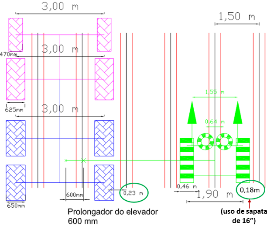
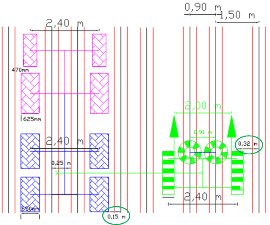
Quando avaliamos o principal espaçamento adotado no Brasil, o simples de 1,50 m e a interação das máquinas com o mesmo, observamos que com o uso das colhedoras de cana de uma linha com bitolas de 1,90 m e conjuntos tratores + transbordos com bitola de 3,0 m o problema relacionado ao afastamento de segurança está na colhedora que tem uma distância de 12 cm, abaixo do mínimo de 15 cm, enquanto que o conjunto trator + transbordo está com 23 cm (figura 1a). Existe a opção de uso de esteiras mais estreitas nas colhedoras de cana com “sapata” de 16 polegadas de largura (40 cm) e com o uso dessa opção o afastamento de segurança da colhedora passaria para 18 cm, ou seja, dentro do mínimo exigido para tal (figura 1b).
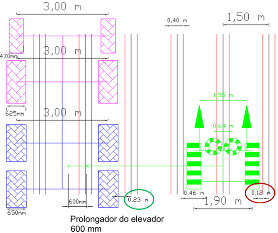
Essa opção confirma o que vem sendo praticado por grande parte das Usinas no Brasil que fazem o controle de trafego de forma eficaz com o uso desse sistema de colheita em espaçamento simples de 1,50 m.
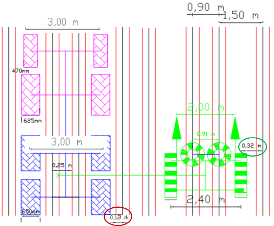
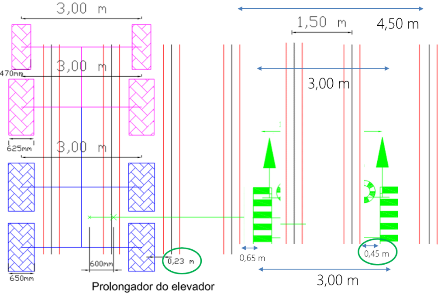
Avaliando a interação máquina x canavial no espaçamento duplo alternado de 0,90m X 1,50 m com a composição de colheita de colhedora de duas linhas com bitola de 2,40 e conjunto trator + transbordo com bitola de 3,0 m, observamos que o problema passa a ser o transbordo que está com 12 cm de afastamento de segurança e abaixo do limite recomendado, enquanto que a colhedora tem 32 cm (Figura 2a). Quando analisamos a composição para colhedoras de duas linhas e conjunto trator + transbordo ambos com bitola de 2,40 m a colhedora permanece com 32 cm e o transbordo para 23 cm de afastamento de segurança, ou seja dentro do limite aceitável (Figura 2b).
O que aconteceu em algumas áreas onde foram adotadas o uso do plantio duplo alternado e que observamos até hoje em campo é que apesar da adequação das colhedoras ao espaçamento, muitas vezes é mantido o conjunto trator + transbordo antigo com bitola de 3,0 m e que não atende ao afastamento de segurança mínimo, em outras palavras, de nada adianta fazer a mudança de espaçamento se não fizer o ajuste dos equipamento para atender à essa bitola, pois o pisoteio da soqueira acaba sendo inevitável principalmente pelo transbordo (BELARDO, 2016c).
Vale lembrar que a possibilidade de desvio do conjunto trator + transbordo é maior do que da colhedora. Nesse caso qualquer descuido do operador do trator pode acarretar no pisoteio da soqueira do canavial, principalmente quando esse conjunto é formado por um trator e dois ou mais transbordos, que são muito mais difíceis de serem controlados e normalmente desviam do traçado original em áreas de maior declividade (BELARDO et al 2015).
Avaliando a opção mais recente de colheita de duas linhas de 1,50 m por colhedoras, observamos que ambos os conjuntos teriam bitolas de 3,0 m e que o afastamento de segurança para a colhedora seria de 45 cm enquanto que para o conjunto trator + transbordo seria de 23 cm, nesse caso, seria a melhor opção entre todas as analisadas relacionada ao afastamento de segurança mínimo (Figura 3).
A melhor solução para evitar esse problema por algum desvio na operação que prejudique o afastamento de segurança tem sido o uso de piloto automático com correção de sinal via RTK, uma ferramenta eficiente para controlar o tráfego e minimizar o pisoteio de soqueira e compactação de solo, possibilitando trafegar com erros da ordem de 2 a 5 cm. Baio e Moratelli (2011), comprovaram que sem o uso de GPS com correção RTK o erro médio é de 17 cm e conseguiram atingir resultados médios de 3,3 cm com o uso do sistema, confirmando que o uso desse equipamento é controlável e positivo para o controle de tráfego.
Como já mencionado anteriormente, sabemos que o desvio dos transbordos é maior que o do trator e mais recentemente Passalaqua e Molin (2016) avaliaram a ocorrência de erros entre passadas dos tratores e das carretas transbordos em terreno plano, terreno em declive sem curvatura e terreno em declive com curvatura.
O resultado mostra que apesar do uso de sistema de piloto automático com correção via sinal RTK, os desvios encontrados para o trator mesmo sendo menores que dos transbordos, estavam acima do valor aceitável em todos os cenários avaliados, porém com valores mais próximos para o terreno plano com percurso reto e mais elevados em terrenos declivosos e percursos curvos. Quando observado o último eixo do segundo transbordo o desvio reflete, em seu pior cenário, a sua passagem sobre a soqueira da fileira adjacente, com erro ultrapassando a distância de separação entre duas fileiras de cana.
Vale lembrar que a colhedora de cana sempre foi vista como a “vilã” com relação a pisoteio de soqueira e compactação de solo, porém conforme observamos nas análises anteriores, vemos que o grande problema de pisoteio de soqueira está relacionado ao conjunto trator + transbordo devido ao menor afastamento de segurança e possibilidade de desvio de traçado.
Com relação à compactação do solo e as pressões exercidas pelos equipamentos, a colhedora que tem aproximadamente 20 t de peso, distribui o seu peso de forma mais uniforme devido a maior área de contato entre a esteira e o solo. Já o conjunto trator com peso de 13 t e dois transbordos com peso sem carga de 6 t cada um mais a carga de cana de 10 t cada, teriam um total de 32 t distribuído de forma mais concentrada gerando uma densidade maior em kg/cm2 e consequentemente maior compactação.
Uma boa opção para minimizar o pisoteio de soqueira devido à desvio de trafego e menor compactação de transbordo é a substituição gradativa de conjuntos de um trator + dois transbordos por transbordos de maior capacidade de carga e maior número de eixos, como os de 21 t e quatro eixos que levam a mesma quantidade de cana, porém trazem benefícios como a distribuição de peso sobre os pneus mais uniforme e ganhos operacionais como menor tempo de manobra e de transbordamento, além obviamente de ter um menor desvio de traçado.

Precisamos de uma forma geral melhorar as nossas analises de conjuntos mecanizados de colheita, pois como pudemos observar, para cada modelo de espaçamento é necessária uma adequação dos equipamentos para controlar melhor o trafego e minimizar o pisoteio de soqueira e compactação da linha e entre linha.
Nesse artigo abordamos principalmente a interação máquina x canavial na colheita, mas sabemos que para maximizarmos e melhorar as operação agrícolas temos que organizar o trabalho com um bom planejamento visando principalmente a melhores eficiências de colheita.
Esse planejamento tem inicio na definição de espaçamentos, zonas de manejo e sistematização das áreas passando por práticas conservacionistas de solo, como uso de cobertura vegetal, rotação de culturas e preparo de solos reduzidos, que aliados a adequação de equipamento e uso de sistema de controle de trafego, podem gerar mais redução de custos e ganhos de produtividade com médias acima 100 t/ha aumentando também a longevidade dos canaviais para mais de 6 anos. Tudo isso obviamente com o objetivo final de melhores resultados econômicos.
Guilherme Belardo, Unesp
Artigo publicado na edição 175 da Cultivar Máquina

Receba por e-mail as últimas notícias sobre agricultura



