






Aplicação eficiente de fungicidas e inseticidas em soja
Adjuvante condicionador de calda combinado com ponta de pulverização correta ajuda melhorar aplicação da mistura de fungicida e inseticida
12.06.2020 | 20:59 (UTC -3)
A construção de um drone para utilização em pesquisas de campo reduz de forma considerável os custos, permitindo inúmeras possibilidades de adaptação e programação conforme a necessidade do usuário.
A utilização na agricultura de Veículos Aéreos Não Tripulados (Vants), popularmente chamados de drones, vem notoriamente chamando a atenção de agricultores, técnicos de campo e pesquisadores em função das inúmeras possibilidades de uso nas propriedades rurais. Através da coleta de imagens, podem-se realizar avaliações visuais simples, permitindo desta forma identificar falhas de plantio, problemas na adubação, manchas dentro de talhões, bem como erros na aplicação de produtos fitossanitários. Em um nível mais criterioso de análise, os drones também podem atuar na obtenção de imagens georreferenciadas de propriedades rurais, permitindo o manejo e dimensionamento das áreas de cultivo, áreas de preservação permanente, que anteriormente só poderiam ser feitas através do uso de imagens obtidas com auxílio de aviões e satélites com custo consideravelmente elevado.

Através das imagens coletadas com auxílio do drone e com o uso de técnicas de geoprocessamento, podem ser gerados mapas topográficos visando a criação de modelos de irrigação e drenagem, índice de área foliar, nível de infestação de pragas, bem como deficiências nutricionais. Em função da diversidade de situações existentes na agricultura, as imagens coletadas em um período de tempo relativamente curto permitem um processamento mais rápido, antecipando o diagnóstico, a tomada de decisão e as intervenções no manejo da cultura.
Existem, no mercado, diferentes modelos de drones e dos mais variados preços, sendo que o fator diferencial será o tipo de uso e do monitoramento a ser realizado. Um dos entraves encontrados por parte dos usuários que pretendem realizar a coleta de dados a campo recai sobre o alto custo desses equipamentos em função das particularidades e do grau de exigência, tanto do equipamento, quanto ao nível de precisão das imagens a serem coletadas.
A precisão na coleta de imagens está diretamente relacionada com a qualidade apresentada pelo drone, principalmente pela estabilidade de voo e autonomia, bem como do sistema utilizado na captura de imagens. A construção de um drone a partir de componentes existentes no mercado consiste numa alternativa considerada de baixo custo, principalmente quando se almeja a realização de trabalhos de pesquisa, o que permite readequar e programar o equipamento conforme a necessidade.
Para a realização de análises e diagnósticos mais complexos, a simples coleta de imagens das áreas de cultivo não nos permite fazer inferências mais precisas, sendo que, para isso, são necessárias imagens no espectro visível e infravermelho. Após a coleta de várias imagens é necessário a geração de um mosaico, obtendo-se uma imagem de toda área considerada objeto do estudo, a qual pretende-se analisar em uma etapa posterior. Com a utilização de diferentes espectros e de cálculos simples, podem-se obter parâmetros mais confiáveis como o NDVI (Índice de Vegetação por Diferença Normalizado) e o NDWI (Índice de Água por Diferença Normalizada). O NDVI permite diferenciar com maior clareza o nível de clorofila das plantas, sendo que, por exemplo, áreas com ataque de insetos ou doenças serão facilmente destacadas nas imagens.
Por outro lado, o NDWI é um recurso interessante para as áreas de cultivo do arroz irrigado, podendo-se analisar falhas na irrigação através da ausência de lâmina de água nas lavouras. Muitos trabalhos já em nível avançado têm sido realizados buscando correlacionar o NDVI referente ao teor de clorofila, a doenças e deficiências nutricionais das plantas cultivadas, porém, ainda necessita-se de maiores estudos visando determinar a altitude ideal de voo, bem como a calibração e validação dos modelos.

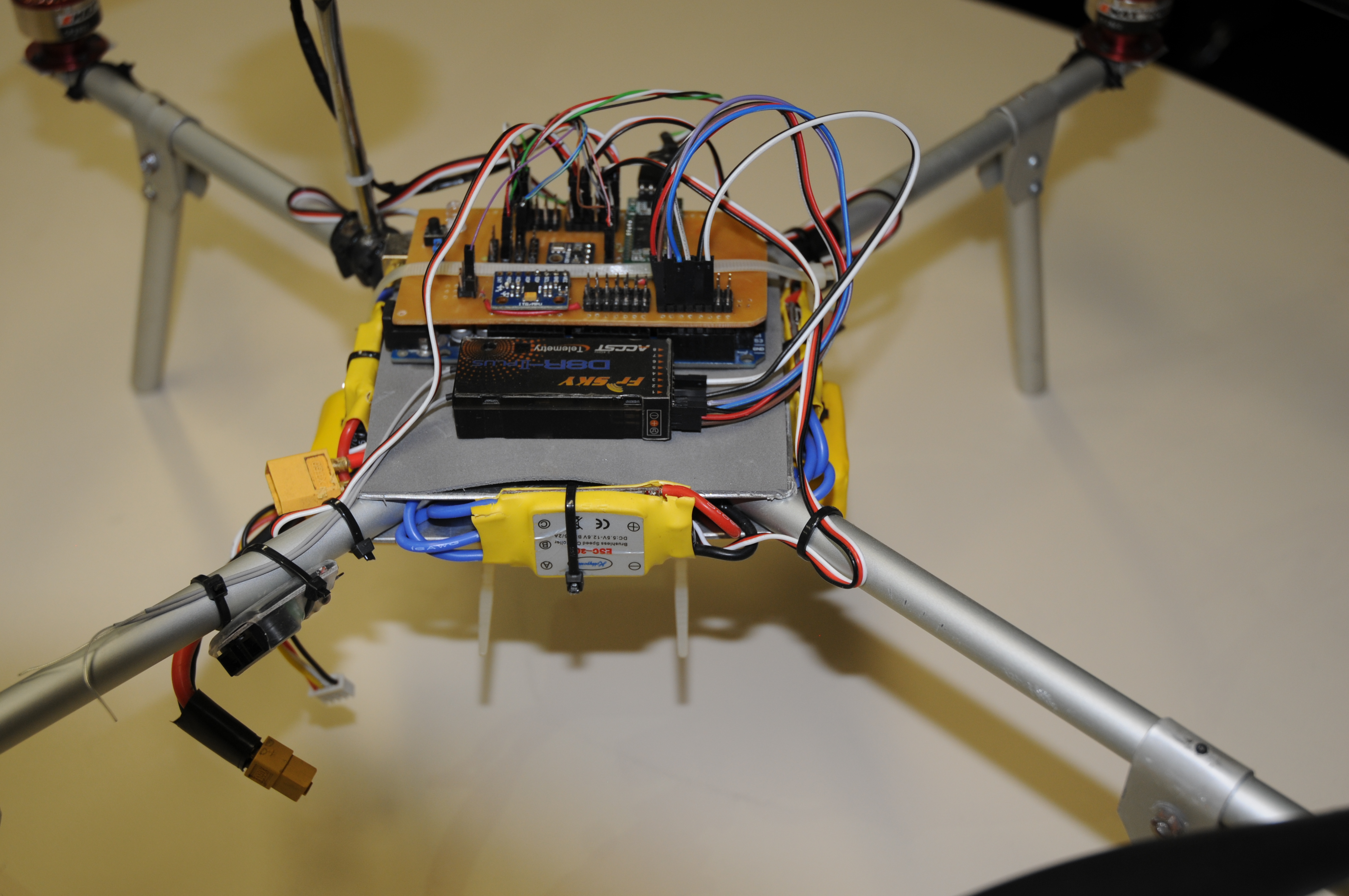
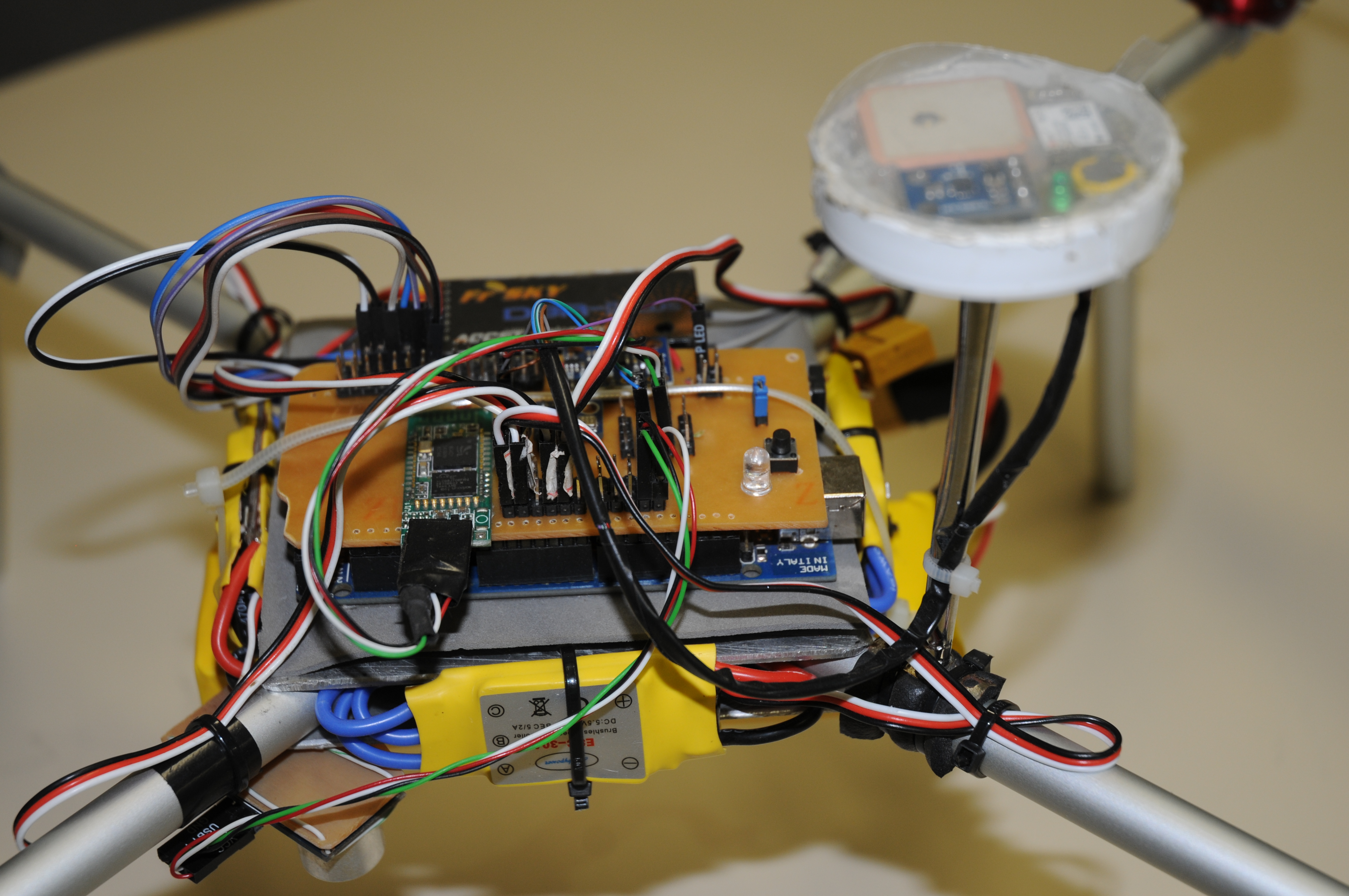
Nesse contexto, o Laboratório de Sistemas Inteligentes e Modelagem (LabSIM), pertencente à Universidade Federal do Pampa – Campus Itaqui (RS), vem realizando diversas pesquisas voltadas à área agrícola referentes à aquisição de dados e desenvolvimento de tecnologias alternativas de baixo custo. A construção de um drone do tipo quadricóptero, alvo das pesquisas realizadas no laboratório, consiste basicamente de um hardware, um firmware e um software.
O hardware é a estrutura física do conjunto, sendo composto por um microcontrolador capaz de seguir comandos, bem como receber a leitura dos sensores e enviar comandos aos motores de propulsão. Dentre os sensores utilizados, tem-se um sensor inercial composto de acelerômetro e giroscópio, ambos responsáveis pela estabilidade e o equilíbrio do conjunto, um sensor de pressão barométrica e um sonar, utilizados no controle da altitude. O GPS e magnetrômetro (bússola) são responsáveis pelo posicionamento e orientação do drone, sendo necessário também um módulo transmissor e receptor para o sistema de telemetria, que permite a comunicação com a estação de controle, e um rádio controle para operação manual. O microcontrolador utilizado é um Arduíno Mega 2560 equipado com uma placa contendo todos os sensores, sendo que o frame (estrutura do quadricóptero) foi construído com tubos e chapas de alumínio. O sistema de propulsão é composto por controladores eletrônicos de velocidade (ESCs), motores brushless e propelentes (hélices).
A estrutura permite o acoplamento de uma câmera para coleta de imagens e um gimbal, mecanismo este que permite manter a câmera sempre em um ângulo vertical durante o voo.
O firmware consiste de um conjunto de instruções programadas carregadas no microcontrolador, responsável por gerenciar todas as operações internas, como leitura dos sensores e controle da potência dos motores. Utiliza-se o firmware MegaPirateNG, este sendo de código aberto, compatível com todos os sensores do conjunto.
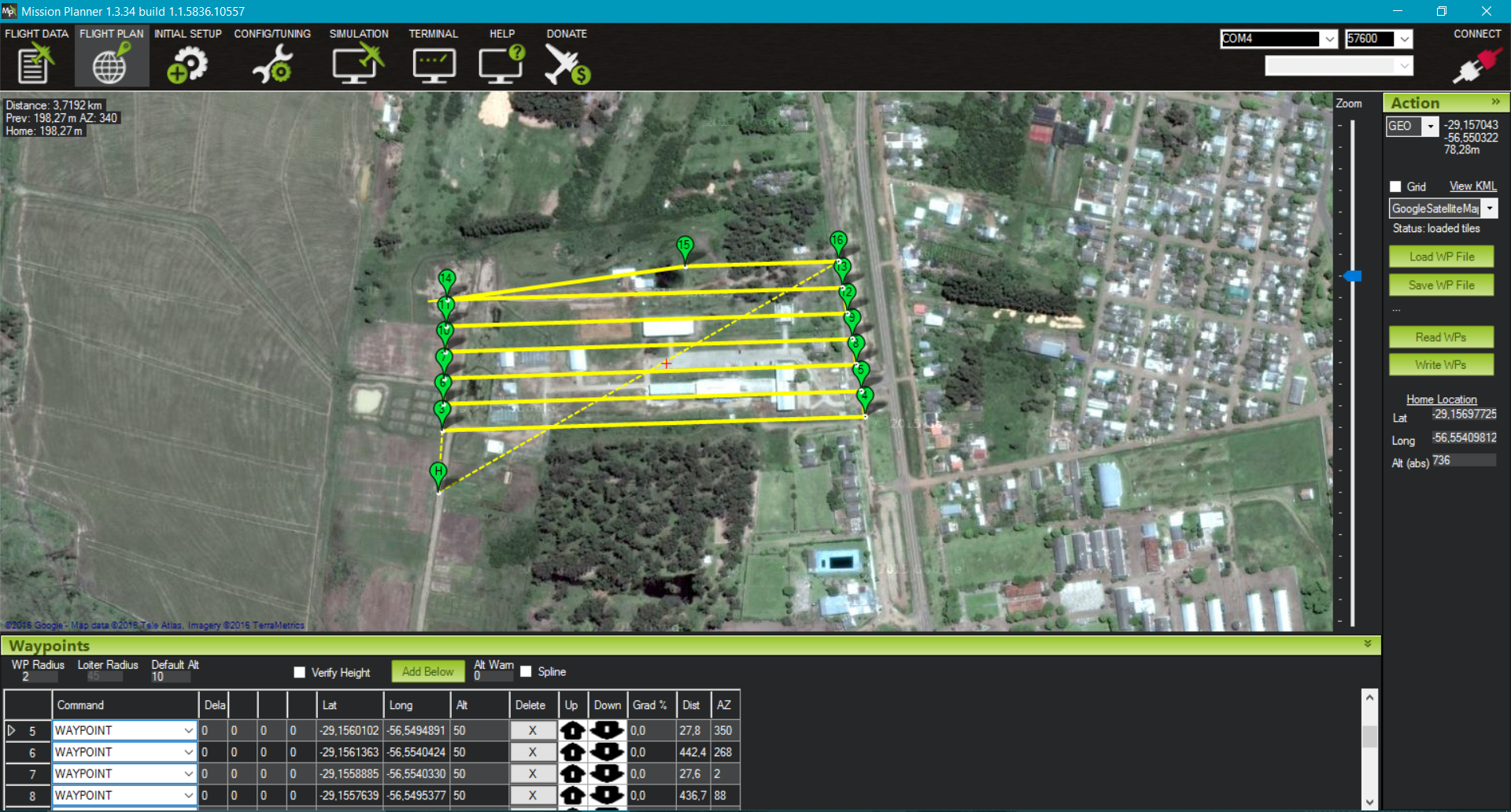
O software é instalado na estação de controle (notebook ou tablet), na qual recebe as informações de voo, bem como a definição de parâmetros, calibração e plano de voo, caso o sistema seja autônomo. Com o sistema autônomo, é possível traçar o plano de voo utilizando mapas georreferenciados através de mapas do Google Maps. Ainda, as ações que serão realizadas como captura de imagem, mudanças de velocidade e altitude são configuradas conforme a necessidade do usuário.
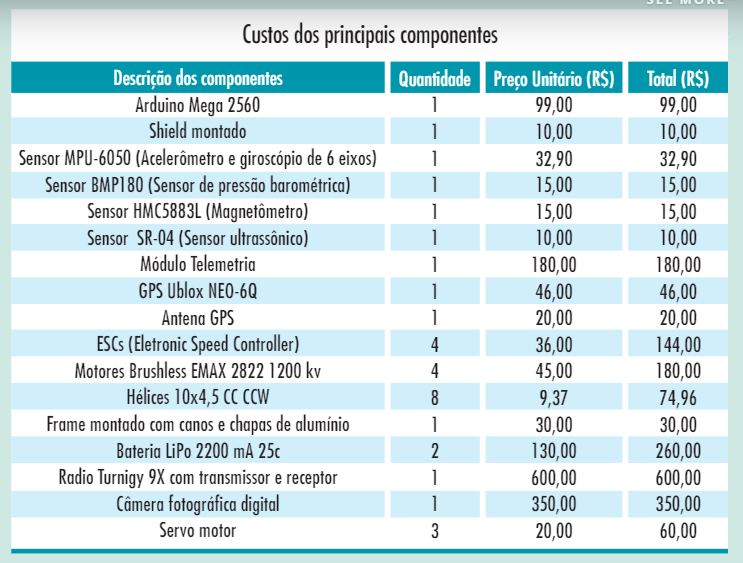
Quando o usuário optar somente por construir um drone para realizar análises visuais, a partir das imagens das áreas de cultivo, utilizando para isto uma câmera fotográfica compacta, o valor do equipamento com os componentes agregados fica aproximadamente R$ 2 mil. Porém, quando a pesquisa a ser realizada necessitar de imagens que permitam fazer análises detalhadas e com um nível de precisão mais apurado, torna-se necessário o uso de câmeras especiais (espectro visível e infravermelho), cujos valores podem ultrapassar facilmente os R$ 10 mil.
A partir de componentes eletrônicos comuns existentes no mercado, torna possível construir um drone de acordo com a necessidade, sendo uma alternativa considerada viável para a realização de pesquisas em função de sua versatilidade e capacidade de adaptação a diferentes equipamentos e sensores. Além dessas vantagens, menciona-se ainda o baixo custo dos componentes, fator este de extrema importância, principalmente em períodos de escassa disponibilidade de recursos, exigindo, desta forma, o desenvolvimento de novas tecnologias e sistemas alternativos.
Carlos Alexandre Romani, Paulo Fernando Escobar Paim, Alexandre Russini, Rogério de Vargas Rodrigues, Cristiano Galafassi, LabSIM, Universidade Federal do Pampa - Campus Itaqui
Artigo publicado na edição 163 da Cultivar Máquinas.

Receba por e-mail as últimas notícias sobre agricultura



